產品別名 |
堆垛機 |
面向地區 |
全國 |
早期的堆垛機是在橋式起重機的起重小車上懸掛一個門架(立柱),利用貨叉在立柱上的上下運動及立柱的旋轉運動來搬運貨物,通常稱為橋式堆垛機。1960年左右在美國出現了巷道式堆垛機。這種堆垛機利用地面導軌來防止傾倒。其后,隨著計算機控制技術和自動化立體倉庫的發展,堆垛機的運用越來越廣泛,技術性能越來越好,高度也越來越高。如今,堆垛機的高度可以達到40米。事實上,如果不受倉庫建筑和費用限制,堆垛機的高度還可以更高。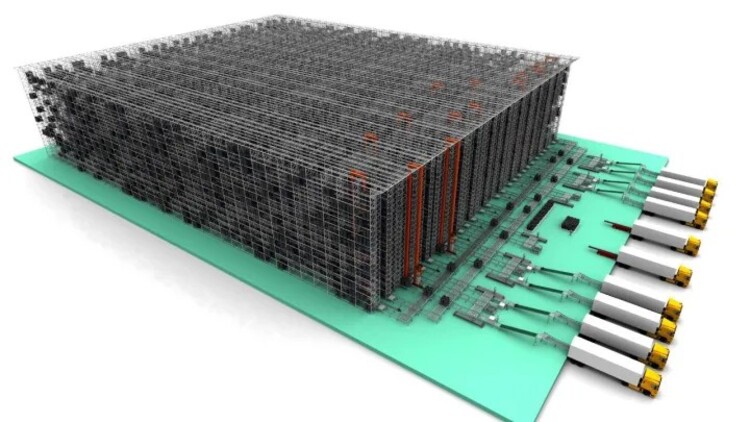
堆垛機的操作方式:
使用堆垛起重機的貨架系統要按貨架的列、層、行的所在貨位分別編號,以便實現向貨位自動地進出庫,也便于利用電子計算機進行在庫管理。實際上,新的大型立體自動倉庫大多采用電子計算機進行在庫管理。然而,為了節省設備投資,在小型自動倉牢中,多數仍采用手動控制和半自動控制。
一、手動控制
手動控制是司機在堆垛起重機的司機臺上一邊查看貨位號碼,一邊操作操縱手柄或按鈕完成行走、升降、貨叉進出。
二、半自動控制
司機在堆垛起重機的司機臺上,按動所需貨位號的按鈕,起重機就自動完成行走、升降各種動作,并停止在的貨位號處。貨叉的進出動作由手動操縱桿或用按鈕進行控制。返回動作大多是按動返回按鈕即可自動返回原位。
三、全自動控制
這是屬于無人操縱的形式,操縱盤裝在起重機外,用按鈕或穿孔卡等為指令。因此,只要按下啟動電鈕,就能遙控堆垛起重機自動進行進出庫動作。近來也有采用磁心存貯器等存貯裝置來存貯各貨位號的庫存量或品種,進行在庫管理的方式。
四、計算機控制
設置與電子計算機直聯的地面控制盤,把進出庫指令輸入電子計算機,進行集中控制。通過電子計算機發出的進出庫指令存貯在地面控制盤上的前置盒式計算器中,計算器一邊控制堆垛起重機把目標貨物自動地進出庫,一邊進行進出庫貨位號、品種、次數等運算,實施在庫管理。
在大型立體自動倉庫中,往往采用這種管理方式。在現已建成的小型立貨架式倉庫中,也有一些采用小型電子計算機進行在庫管理的。
堆垛機作為自動化立體倉庫核心設備,堆垛機應用范圍比較廣泛,一般多用于機械制造業、汽車制造業、紡織業、鐵路等等行業中。它的操作方式有三種,即手動操作,半自動操作,還有一種就是全自動操作,通過這樣操作實現把貨物從一處運輸到另一處的目的。
直線運行型堆垛機
直線運行型堆垛機:它是指只能在巷道內直線軌道上進行運行操作的,不可以自行轉換軌道運行。
直線運行型堆垛機的特點:
1、只能通過其他輸送設備轉換巷道
2、可以實現高速運行
3、可實現出入庫頻率較高的立體倉庫作業
4、應用較為廣范圍
在堆垛機的發展歷程中,每一項新技術都使其性能更加,更能滿足企業的需求。堆垛機初是由人工控制,操作人員需要通過經驗和技巧來完成操作。然而,這種方式存在著諸多不足,如操作效率低下、作業精度不高等問題。隨著計算機技術和人工智能技術的發展,堆垛機逐漸實現了自動控制,讓堆垛機能夠按照預設的程序進行作業,大大提高了作業效率和精度。
除此之外,隨著人工智能技術的不斷發展,堆垛機還具備了更多的智能化功能。例如,堆垛機可以通過人工智能技術實現自主決策和智能調度,優化作業流程,提高倉儲效率。此外,堆垛機還可以與其他設備進行聯動,實現全自動化的倉儲管理,為企業節約人力成本,提升整體運營效率。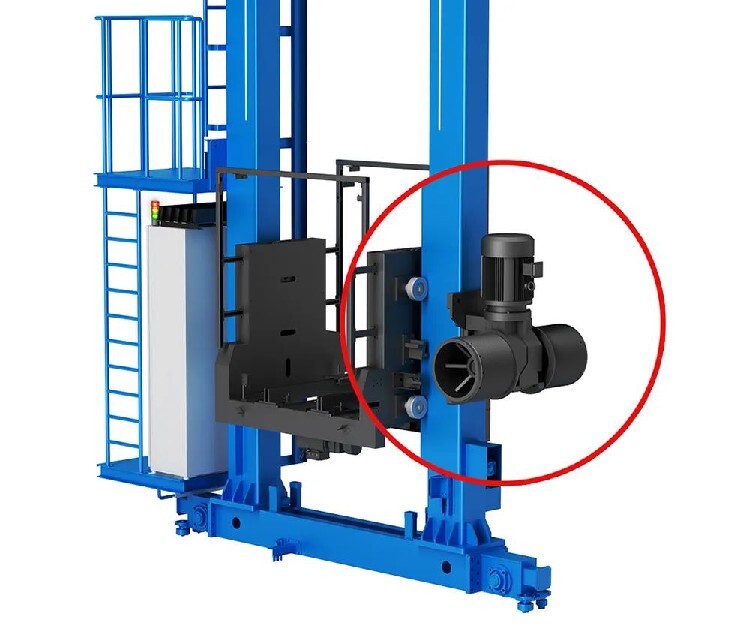
堆垛機是自動化立體倉庫輸送系統的核心,是重要的起重運輸設備。在計算機技術的操作下,它沿著導軌在立體倉庫的巷道間來回穿梭,將位于巷道入口處的貨物存放到貨物入口處,或按照指令將貨物取出到巷道入口處,并立完成機械化和自動化的倉儲操作。此外,堆垛機還可以及時處理進出信息,以適應黑暗、低溫等特殊操作環境。堆垛機通過行走、提升和叉三種驅動結構完成操作要求,采用國際的變頻或伺服控制系統和激光地址系統進行全閉環控制,采用條形碼或激光測距等地址方式,實現堆垛機的操作。