手動跑偏傳感器
動作角度:30±3° 3.2
觸桿的動作力:20N~100N 3.3
復位角度:15±5° 3.4
觸桿的極限角度:≥70° 3.5
輸出接點:一對常開
注意:進行接線時,接線腔內不得有散亂的導線及放置其它雜物。
注意:各設備接線完后,應檢查連線是否正確,有無漏接和短路現象。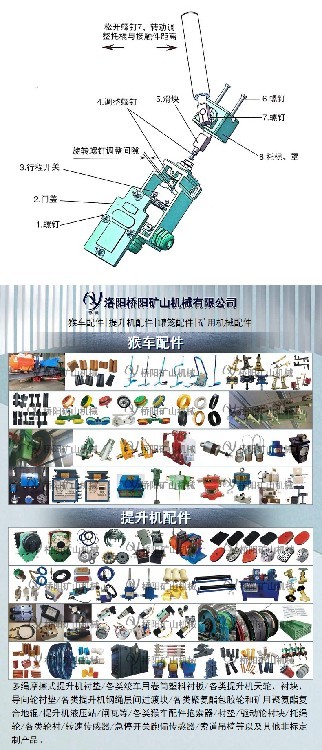
跑偏傳感器是一種用于監測設備或機械部件偏離預定位置的裝置。它可以廣泛應用于多種工業場景中,如輸送帶、傳送系統、機械臂等運行軌跡的監控。其主要功能是在設備運行過程中檢測是否發生偏移,并通過警報或控制信號及時反饋,以糾正問題或停止設備運行,避免安全隱患和財產損失。 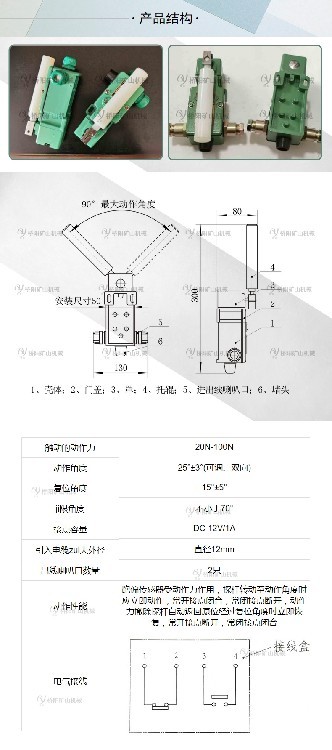
跑偏傳感器的工作原理通常基于光電、機械接觸或電磁等技術感應器,具體選擇取決于應用場景和需求。在輸送帶系統中,跑偏傳感器常見于設備的兩側,當輸送帶發生側向偏移超過設定閾值時,傳感器會觸發報警或停機信號。 這種傳感器的優勢在于能夠提高設備運行的穩定性,減少因跑偏導致的磨損、故障和生產中斷,廣泛應用于煤礦、物流、制造等行業。 例如