關鍵詞 |
遙操作,模擬醫學,虛擬針灸,靈巧手 |
面向地區 |
全國 |
Omega.6力反饋通過引入筆形末端執行器來捕捉手的位置,進一步增強了Omega.3基礎的功能。 通過在每個自由度周圍實現的平衡式運動設計,該筆將性能靈巧性融入到設備中。 6自由度運動學接口將控制器集成到單個封裝中,增加了其多功能性。 醫療機器人需要遠程操作靈巧機器人,高度符合人體工程學的末端執行器使得Omega.6成為模擬培訓的助手。 左手與右手都可使用Omega.6,并且Omega.6可集成到雙工作站設置中進行雙手操作。
Omega.6力反饋廣泛應用于:
>醫療機器人和空間機器人
>微型和納米手術機器人
>遙控操作臺
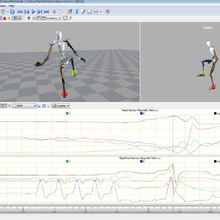
>虛擬模擬
>訓練系統
>研究
特的設計理念
圍繞其特的平行運動學結構精心打造,Omega.x系列專為而設計。其優良的機械剛度與控制器相結合,能夠以4KHz的速率渲染高接觸力。為了提供高觸覺透明Omega.6將被動部件和致動部件結合在一起,可以在平移和定位空間中保持的重力補償。設備每個系統都經過單校準以確保可重復性、精度和性能需求。其特的運動學設計將翻譯和旋轉分離,使omega.x基座能夠適應各種可互換的末端執行器,這樣可以滿足各種應用需求。Force Dimension可以末端執行器應用程序提供技術支持。
質量
Omega.6的設計具有的性能 - 沒有塑料部件用于設備的任何結構,實現高可靠性和觸覺質量。
準確性
傳感器提供一次性無漂移校準。
剛度
由于其特的專利并聯運動學結構,Omega.6觸覺裝置具有高閉環剛度,可以實現更加逼真的效果。
舒適
所有Omega.6積極的重力補償有利于減輕用戶疲勞。
安全
機載CPU實時監控速度,并且如果主機出現問題,在觸覺設備上實現電磁阻尼。

全國Omega熱銷信息