關鍵詞 |
各類半成品立體倉庫,基隆市立體倉庫,電纜立體倉庫,各類半成品立體倉庫 |
面向地區 |
全國 |
圖1為本文設計的智能機器人倉儲物流系統總體方案,其集成了自動化立體倉庫、AGV、機器人、視覺傳感器、激取光料傳感器等,由機器人完成物料的拾取、擺放、搬運和分撿,視覺系統完成對物料的形狀、位置和顏色識別,傳感器完成移動機器人的定位和避障等,該系統實現了齒輪箱的裝配和拆解工作,其適用性廣,衍生能力強。設計齒輪箱裝配工藝流程如圖2所示。
該智能機器人倉儲物流系統主要包括自動化立體倉庫、平臺式AGV、復合機器人、雙臂機器人、叉車AGV等硬件設備。
(1)自動化立體倉庫
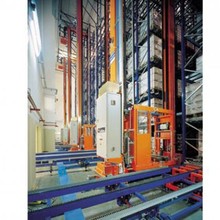
自動化立體倉庫是現代生產系統自動化程度提高的重要標志,在有限的占地面積下能夠實現貨物的大量、有效存儲,充分利用空間資源。如圖3所示,本文設計自動化立體倉庫包括貨架、堆垛機、出入庫平臺組成。其中堆垛機的行走軸實現堆垛機沿著立體倉庫長度方向運動、升降軸實現堆垛機沿著立體倉庫高度方向運動,貨叉伸縮軸實現貨物托盤的抓取。出入庫平臺安裝有貨物托盤檢測傳感器,用于判斷出入庫平臺與機器人的對接情況。零件出入庫平臺設有一段升降式運輸平臺①,其處于低位時與平臺AGV對接,處于高位時與出入庫平臺②對接。

設備狀態監測:平臺式AGV及叉車AGV 狀態監測包括AGV位置監測、電量監測、載貨狀態監測和運行狀態監測等;復合機器人狀態監測包括位置監測、電量監測、載貨狀態監測、使能狀態監測和空閑狀態監測等;雙臂機器人狀態監測包括機器人使能狀態監測、機器人空閑狀態監測、料臺上下料完成狀態監測等;立體倉庫狀態監測包括立體倉庫堆垛機使能狀態監測、空閑狀態監測、貨架中貨物狀態監測、出入庫平臺空間狀態監測、出入庫平臺上下料完成狀態監測等。
存儲管理:包括貨架庫存信息、立體倉庫出入庫歷史信息記錄和事件日志信息。人機交互界面:包括信息顯示、手動操作和自動操作界面。
旋轉處理模型
旋轉處理即以中心點為旋轉參考點,旋轉修正,如圖10a所示。設定P0(x0 ,y0) 為輪廓中心點坐標,B(x23 ,y23)為待修正后矩形一邊的中心點坐標, A(x'23,y'23)為修正后矩形一邊的中心點坐標。根據P0和B點坐標求得A點坐標,如式(3):

齒輪箱的裝配和拆解過程嚴格按照工藝流程執行,驗證了本文所設計的智能機器人倉儲物流系統的可靠性及穩定性。平臺式AGV與出入庫平臺的成功對接驗證了本文二維碼視覺定位的有效性及穩定性。