關鍵詞 |
工具立體倉庫,宿州立體倉庫,電纜立體倉庫,工具立體倉庫 |
面向地區 |
全國 |
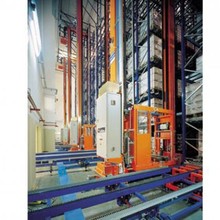
圖1為本文設計的智能機器人倉儲物流系統總體方案,其集成了自動化立體倉庫、AGV、機器人、視覺傳感器、激取光料傳感器等,由機器人完成物料的拾取、擺放、搬運和分撿,視覺系統完成對物料的形狀、位置和顏色識別,傳感器完成移動機器人的定位和避障等,該系統實現了齒輪箱的裝配和拆解工作,其適用性廣,衍生能力強。設計齒輪箱裝配工藝流程如圖2所示。
本文所設計的智能機器人倉儲物流系統對AGV和復合機器人移動底盤的定位精度要求較高,尤其是在平臺式AGV與立體倉庫升降式運輸平臺對接及復合機器人和平臺式AGV對接時,目前移動底盤常用的導航方式很難滿足需求。針對目前AGV常用導航方式精度低、實時性差、無法實現位姿修正等問題,本文提出一種二維碼視覺定位方法。將視覺攝像頭安裝于AGV的中心底部,使攝像頭光心與AGV旋轉中心重合,并在攝像頭周圍安裝光源,克服光線變化的影響。通過識別地面上的二維碼,經視覺處理將數據反饋給AGV運動控制系統,實現 AGV的定位。
齒輪箱的裝配和拆解過程嚴格按照工藝流程執行,驗證了本文所設計的智能機器人倉儲物流系統的可靠性及穩定性。平臺式AGV與出入庫平臺的成功對接驗證了本文二維碼視覺定位的有效性及穩定性。