直流有刷電機驅動器(DC brushed motor driver)是一種用于控制和驅動直流有刷電機的電子設備。這些驅動器主要用于需要控制轉速和方向的應用,例如機器人、自動化系統、工業設備和消費類電子產品中。 ### 結構和工作原理 直流有刷電機驅動器的基本結構包括以下幾個關鍵部分: 1. **電源輸入**:通常是直流電源,其電壓和電流規格取決于所驅動電機的要求。 2. **電機接口**:用于連接直流有刷電機的電源線和控制信號線。典型的接口包括電源線(通常是正極和負極),以及控制電機轉速和方向的輸入信號。 3. **電機驅動電路**:驅動電路可以分為功率驅動部分和控制邏輯部分。 - **功率驅動部分**:負責提供電流以驅動電機的轉子,通常通過功率晶體管(MOSFET)或功率BJT(雙極型晶體管)來實現。 - **控制邏輯部分**:接收來自控制器(如微控制器或PLC)的輸入信號,根據輸入信號調整功率驅動部分的輸出,控制電機的速度和方向。 4. **保護電路**:為了保護電機和驅動器本身,通常會包括過載保護、過電流保護和過熱保護電路。 ### 功能和特性 直流有刷電機驅動器具有以下功能和特性: - **速度控制**:通過調整輸入信號的脈寬調制(PWM)或電壓來控制電機的轉速。 - **方向控制**:通過控制輸入信號的極性或使用額外的控制信號線來改變電機的旋轉方向。 - **電流調節**:一些驅動器可以監測和調整輸出電流,以電機工作在安全和的電流范圍內。 - **編碼器反饋支持**:對于需要更位置控制的應用,驅動器可以與編碼器結合使用,以提供位置反饋。 - **低功耗模式**:一些驅動器支持低功耗待機模式或睡眠模式,以節省能量。 ### 應用領域 直流有刷電機驅動器廣泛應用于各種領域,包括但不限于: - **機器人技術**:用于驅動機器人的關節和移動部件。 - **工業自動化**:用于控制輸送帶、泵和風機等設備。 - **消費類電子產品**:如電動工具、電動玩具和家電。 - **汽車和交通**:在汽車的座椅調節、車窗升降等系統中使用。 - **醫療設備**:例如手術機器人和呼吸機。 ### 選擇驅動器的考慮因素 選擇適當的直流有刷電機驅動器時,需要考慮以下因素: - **電機規格**:包括電壓、電流、額定功率和大功率等。 - **控制要求**:速度范圍、精度和響應時間。 - **環境條件**:如溫度范圍和防護等級。 - **集成需求**:是否需要集成編碼器反饋或其他傳感器。 - **成本和可靠性**:驅動器的成本、可靠性和維護要求。 綜上所述,直流有刷電機驅動器是現代電子控制系統中不可或缺的部分,通過有效地控制電機的轉速和方向,實現了許多自動化和電動化應用的核心功能。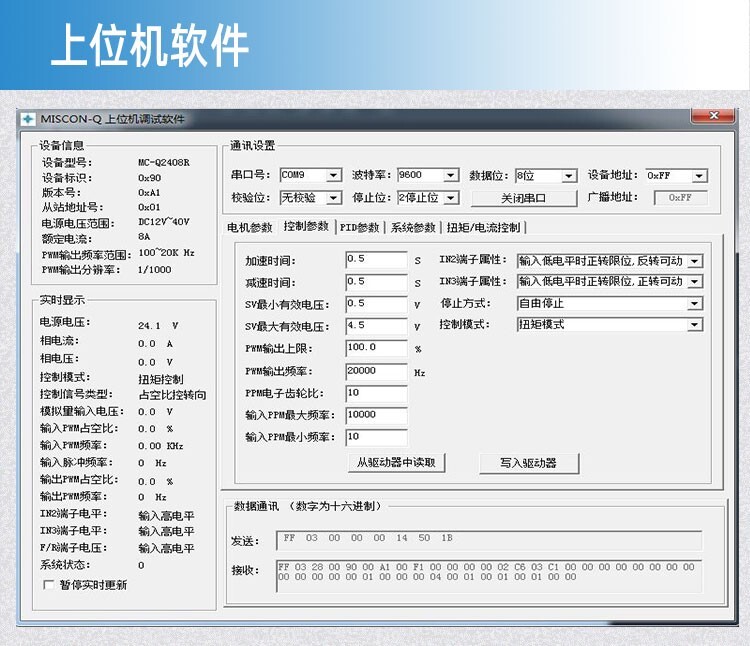
淼控智能品牌驅動器直流有刷電機小尺寸國產控制器閉環PID控制調速正反轉PWM控制RS485 Modbus RTU遠程控制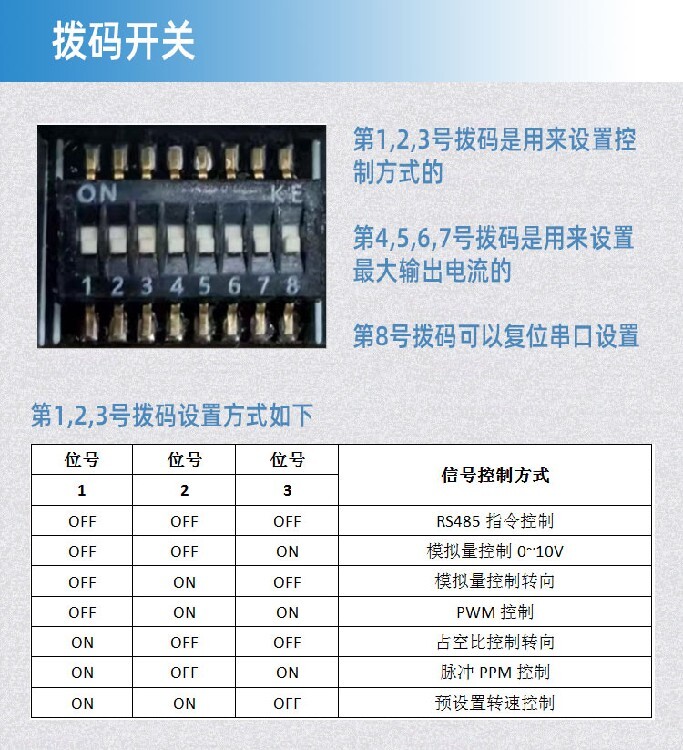
圖1-1
4個定位孔距為:45mm x 45mm,定位孔直徑為:3.3mm
機械尺寸:50mm x 50mm x 20mm(長x寬x 高),實際使用時,如果是側插的端子(默認),需要預留20mm左右的空間,插上端子以后約為70mm x 50mm x 20mm
如果是立插的,實際尺寸約為:50mm x 50mm x 26mm(長x寬x 高)
可通過撥碼開關選擇利用RS485指令控制,撥碼開關設置請參考1.3;當選擇RS485指令控制時,方向控制端口和信號輸入端口均無效。當多臺控制器通過RS485總線組網時,可以參考圖2-7接線方式,此時需要注意在首臺和尾臺需要各加一個120歐姆的終端電阻。

可通過撥碼開關選擇利用模擬量控制,撥碼開關設置請參考1.3。IO電平控制轉向信號,懸空時為高電平信號,輸入0V會改變電機轉向。再次輸入高電平(3.3V ~ 24V)會變回原來的轉向。
利用電位器調速時,請將撥碼開關設置成與模擬量控制方式一致;撥碼開關的設置方法參考1.3。同時將輸入大有效電壓設置為5V,或者5V以下時,當電位器旋轉到大可以達到全速。
點擊“從驅動器中讀取”按鈕,將驅動器當中的當前參數讀出來,使得上位機軟件與驅動器內部的參數保持一致。然后在按照實際使用情況設置好參數,正確設置,設置完成以后,點擊“寫入驅動器”按鈕即可。
在該頁當中:
電流閉環比例系數(P): 電流閉環控制參數;
電流閉環積分系數(I): 電流閉環控制參數;
電流閉環微分系數(D): 電流閉環控制參數;
電流閉環參數對電流模式有影響;