宏升噴涂機器人維修保養(yǎng)技術(shù)嫻熟 控制電源過電壓,控制電源逆變器上P,N之間電壓超過規(guī)定值,驅(qū)動器內(nèi)部電路有缺陷等原因,13號報警,主電源欠電壓,發(fā)生瞬時斷電,電源接通瞬間的沖擊電流導(dǎo)致電壓跌落,缺相或驅(qū)動器內(nèi)部電路有缺陷等原因,14號報警。
常州昆泰自動化專注工控行業(yè)的維修,作為一家公共維修行業(yè)的,24小時接修服務(wù),快速響應(yīng)時間1小時;可以為長三角地區(qū)客戶提供上門服務(wù),力爭做到一般問題當(dāng)天解決;技術(shù)人員具備級維修優(yōu)勢,維修技術(shù)好,水平高。根據(jù)客戶產(chǎn)品、工況具體的需求、應(yīng)用方式等進行系統(tǒng)集成,整個過程包括方案制定、產(chǎn)品設(shè)計、機械加工、電氣集成、安裝調(diào)試、服務(wù)等環(huán)節(jié)。廣州廣科智能技術(shù)有限公司沈::://gkznjs:廣州市黃埔區(qū)永紅西街3號隨著我國改革步伐的加快和國民經(jīng)濟的高速發(fā)展,一些企業(yè)也相應(yīng)地以“更新裝備,加強技術(shù)改造,適應(yīng)市場需求,生產(chǎn)有競爭力的產(chǎn)品,穩(wěn)定提高企業(yè)效益作為企業(yè)求生存、圖發(fā)展的關(guān)鍵措施之一。在此背景下,在機械制造業(yè)中使用焊接機器人的數(shù)量也急劇增加。目前,國內(nèi)各大摩托車生產(chǎn)企業(yè)都在上自動化生產(chǎn)線,如何更好的實現(xiàn)摩托車車架焊接生產(chǎn)自動化,日產(chǎn)焊接機器人及變位機都能滿足自動化要求,自動化生產(chǎn)線能否正常運轉(zhuǎn)。
電線不得與金屬物綁在一起,各種施工用電設(shè)備按規(guī)定進行保護接零及裝設(shè)漏電保護器,遇有臨時停電或停工休息時,拉閘加鎖,有人觸電時,應(yīng)立即切斷電源,進行急救,電氣著火時,應(yīng)立即將有關(guān)電源切斷,使用絕緣滅火機或干砂滅火。 即O[65]:PLC_O_END_ELECTRODE1,測量磨損電極補償量設(shè)定測量磨損電極補償量設(shè)定:參考基準(zhǔn),來測量換帽,修磨帶來的磨損量,使電極補償相應(yīng)的磨損量,原理如下:磨損量是參考個電極補償基準(zhǔn)來測量的。
導(dǎo)入新的PNS0010程序后,故障現(xiàn)象依舊存在。機械手工具坐標(biāo)變動。按以下步驟對機械手進行初始化并導(dǎo)入系統(tǒng)備份程序:斷開控制器電源,打開控制器電源同時按住示教器上的F1及F5功能鍵→3→1→MENUS→插入MC存儲卡→4,variables→72,對機械手進行命名,確保機械手名稱和MC存儲卡中存儲系統(tǒng)備份程序的文件夾名稱一致→MENUS→5,file→F4,[RESTOR]→5,allofabove→F4,[YES]→按FCTN功能鍵→1,START(COLD)。
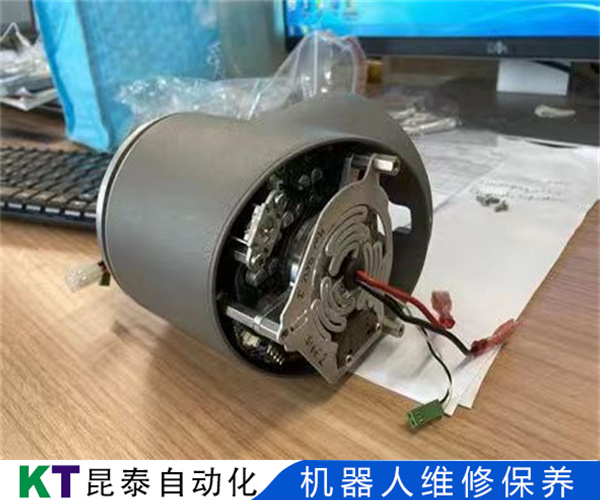
宏升噴涂機器人維修保養(yǎng)技術(shù)嫻熟 1、檢查電源連接:確保機器人的電源線正確連接到電源插座,并且插緊。檢查連接是否松動、斷裂或損壞。如果發(fā)現(xiàn)問題,重新插拔電源線,確保連接牢固。 2、檢查電源開關(guān):確認(rèn)機器人的電源開關(guān)是否打開,并處于正確的位置。如果電源開關(guān)有問題,可能需要更換或修復(fù)。 3、檢查電源供應(yīng):使用電壓檢測儀或多功能測試儀測量電源輸出,確保電源輸出符合規(guī)格要求。如果電源供應(yīng)不足或發(fā)現(xiàn)異常,可能需要更換電源或修復(fù)故障的電源模塊。 4、檢查保護裝置:一些機器人電源可能配備了過載保護或過流保護裝置。檢查保護裝置是否觸發(fā),如果需要,進行復(fù)位或更換故障的保護裝置。 5、更換電源燈:如果經(jīng)過檢查發(fā)現(xiàn)電源燈本身有損壞或故障,可能需要更換電源燈。根據(jù)機器人型號和制造商的建議,選擇適合的電源燈進行更換。
4、檢查保護裝置:一些機器人電源可能配備了過載保護或過流保護裝置。檢查保護裝置是否觸發(fā),如果需要,進行復(fù)位或更換故障的保護裝置。 5、更換電源燈:如果經(jīng)過檢查發(fā)現(xiàn)電源燈本身有損壞或故障,可能需要更換電源燈。根據(jù)機器人型號和制造商的建議,選擇適合的電源燈進行更換。 如圖G所示,圖G特別說明:圖中的*號代表未分配,不可以使用該信號,根據(jù)CRMACRMA16的物理編號和IO表,可用信號是從101~120這范圍,所有其他范圍都為*號,10)按住[SHIFT]鍵+向下鍵進行翻頁找到101的范圍。2)查看主機板、存儲板、核算板、以及驅(qū)動板。.3)查看柜子里面無雜物、灰塵等,查看密封性4)查看接頭是否松動,電纜是否松動或者破損的現(xiàn)象。5)查看風(fēng)扇是否正常。6)查看程序存儲電池。7)優(yōu)化FANUC機器人操控柜硬盤空間,運轉(zhuǎn)空間正常。8)檢測示教器按鍵的有效性,急停回路是否正常,顯現(xiàn)屏是否正常顯現(xiàn),接觸功用是否正常。9)檢測機器人是否能夠正常完結(jié)程序備份和重新導(dǎo)入功用。10)查看變壓器以及絲。FANUC機器人保養(yǎng)其它事項1)清潔機器人。2)FANUC機器人軟件備份。3)查看機器人作業(yè)方位。FANUC機械手保養(yǎng)作業(yè)人員應(yīng)遵從如下所示。-操進行機器人的電源ON/OFF操作。從操作面板啟動機器人程序。
導(dǎo)致觸摸屏無法工作,03東莞安川機器人示教器故障維修提示,以下為更換觸摸屏流程詳解,關(guān)于其它故障維修請查看安川NX100示教器維修手冊,1.用十字螺絲刀卸除示教器背部八個緊固螺絲,如左圖所示,然后把示教器后蓋打開。
BROKK布魯克,瑞士的STAUBLI史陶比爾,leister萊斯特,美國Adept,Graco,ITWRansbug,林科,意大利的Tiesse,Comau柯馬,奧地利的IGM,Wittmann威猛等等品牌。發(fā)現(xiàn)它全為噪聲,無法讀出故障原因:電流監(jiān)控輸出端沒有與交流電源相(變壓器)。處理方法:可以用直流電壓表檢測觀察。電機在一個方向上比另一個方向跑得快(1)故障原因:無刷電機的相位搞錯。處理方法:檢測或查出正確的相位。(2)故障原因:在不用于測試時,測試/偏差開關(guān)打在測試。處理方法:將測試/偏差開關(guān)打在偏差。(3)故障原因:偏差電位器不正確。處理方法:重新設(shè)定。電機失速(1)故障原因:速度反饋的極性搞錯。處理方法:可以嘗試以下方法。a.如果可能,將反饋極性開關(guān)打到另一。(某些驅(qū)動器上可以b.如使用測速機,將驅(qū)動器上的TACH+和TACH-對調(diào)接入。c.如使用編碼器,將驅(qū)動器上的ENCA和ENCB對調(diào)接入。
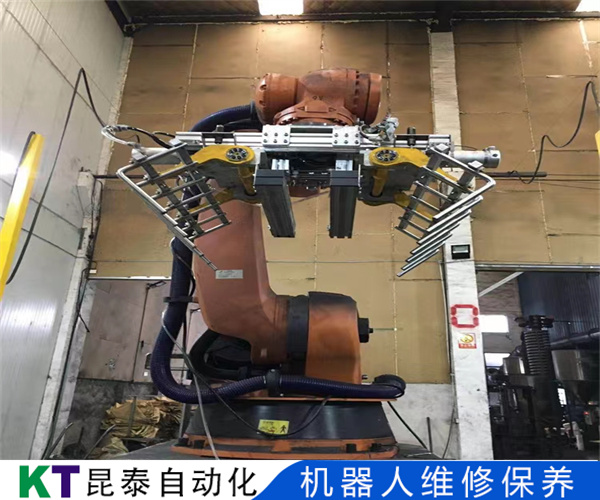
宏升噴涂機器人維修保養(yǎng)技術(shù)嫻熟 1、軸卡住:清掃軸在使用一段時間后,可能會被地面上的頭發(fā)、纖維和其他雜物卡住,導(dǎo)致無法轉(zhuǎn)動。在這種情況下,可以先關(guān)閉機器人電源,用剪刀或鑷子等工具將卡住的雜物取出,然后再重新啟動機器人,測試清掃軸是否能正常轉(zhuǎn)動。 2、此外,還可能是電機故障、傳感器故障、控制板故障、電源故障、驅(qū)動故障、程序錯誤、機械結(jié)構(gòu)故障等。例如,電機故障可能導(dǎo)致軸無法轉(zhuǎn)動或轉(zhuǎn)動不順暢;傳感器故障可能導(dǎo)致機器人無法正確感知軸的位置或狀態(tài);控制板故障可能導(dǎo)致信號傳輸錯誤或控制指令無法正確執(zhí)行等。 3、要解決機器人軸不動的故障,需要逐一排查以上可能的原因,并采取相應(yīng)的措施進行修復(fù)。如果問題無法解決,建議聯(lián)系維修人員進行進一步的協(xié)助。同時,在維修過程中需要注意安全,避免造成進一步的損壞或人身傷害。
才能涂層質(zhì)量及涂膜厚度的均一,這也是提高涂料利用率的重要措施之一,(4)發(fā)那科噴涂機器人的旋杯轉(zhuǎn)速發(fā)那科噴涂機器人旋杯轉(zhuǎn)速是對高轉(zhuǎn)速旋杯霧化細(xì)度影響的因素,當(dāng)其他工藝參數(shù)不變時,旋杯的轉(zhuǎn)速越大。 ABB機器人IRC5示教器觸摸板維修,ABB機器人M2000示教器觸摸屏維修,ABB機器人示教編程器觸控屏維修,ABBIRC5手持編程器觸控面板維修,ABBROBOTM2004示教器觸摸屏更換維修,ABB教導(dǎo)盒觸摸屏維修。
多次出現(xiàn)模塊直流過壓故障,導(dǎo)致將用戶高壓開關(guān)跳掉。用戶母線電壓過高,6KV電源實際母線達6.3KV以上,10KV電源實際母線達10.3KV以上,母線電壓加到變頻器上時模塊輸入電壓過高,模塊報直流母線過壓。變頻器在啟動過程中,安川伺服驅(qū)動器維修大約到運行到4HZ左右,變頻器直流母線過壓。安川機器人驅(qū)動器維修故障原因變頻器在停機過程由于降速太快,使得電機處于發(fā)電機狀態(tài),電機回饋能量到模塊的直流母線產(chǎn)生泵升電壓,從而使直流母線電壓過高。由于現(xiàn)場變壓器出廠標(biāo)準(zhǔn)接線是10KV和6KV,母線電壓如果超過10.3KV或6.3KV,就會使變壓器輸出電壓過高,從而使模塊的母線電壓升高造成過壓。安川伺服驅(qū)動器維修同一的不同相模塊光纖接反(比如A4與B4光纖接反)。
E1156[手臂控制板]處理過程超時,E1157手臂ID接口板失誤,代碼=XXE1158(SSCNET)軸XX的伺服失誤,E1159(SSCNET)伺服的失誤代碼為XX,E1160(SSCNET)軸XX的伺服失誤及監(jiān)視器錯誤。
TgEfOguVtKf