關鍵詞 |
供應巷道修復機,巷道修復機價格表,鄭州巷道修復機,定制巷道修復機 |
面向地區 |
全國 |
煤礦用巷道修復機(簡稱巷修機)該機具有以下特點:
1、與傳統的人工清底相比,使用該機在大大節約人工成本的同時,提高了工作效率,改善了工作環境。
2、與傳統的柴油機動力小型挖掘機相比,由于采用電動液壓系統,因而具有噪聲低、無尾氣污染等特點,更適用于井下巷道修復。
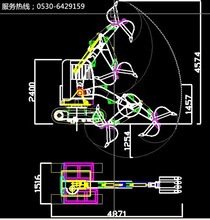
3、整機結構緊湊、外形尺寸小,入井時工作裝置可回收到小尺寸,便于整體入井及升井。
4、整機結構緊湊、外形尺寸小,當回轉時尾部與兩幫不會碰撞,因此更加適用于井下狹小空間作業。
5、與同類型設備相比,工作裝置前端的鏟斗或破碎錘頭可以360°旋轉,更加方便巷道修復。
6、主要動作采用先導閥控制,操作輕松簡便,工作平穩無沖擊。巷道修復機參數
室內各操作手柄布置(手柄操作指示牌):現將各操作手柄及按鈕的功能及操作方向分別說明如下(方向基準為機器行走馬達位于后部,操作者面向機器前進方向):
1、左操縱桿:操縱桿向前推,斗桿油缸伸出,斗桿收回;操縱桿向后拉,斗桿油缸縮回,斗桿張開;操縱桿向左拉,右側油缸伸出,左側油缸收回,副臂在水平面向左擺動≥40°;操縱桿向右拉,左側油缸伸出,右側油缸收回,副臂在水平面向右擺動≥40°。
2、右操縱桿:操縱桿向前推,主臂油缸伸出,主臂升起;操縱桿向后拉,主臂油缸收回,主臂下降;操縱桿向左拉,鏟斗油缸伸出,鏟斗收回;操縱桿向右拉,鏟斗油缸收回,鏟斗伸出。
3、行走操縱桿:兩個操縱桿同時向前推時,機器向前行走;兩個操縱桿同時向后拉時,機器向后行走;僅推右邊操縱桿時,機器向左轉;僅推左邊操縱桿時,機器向右轉;在向后拉一個操縱桿的同時向前推另一個操縱桿,則機器原地旋轉。
4、主臂翻轉操縱桿:操縱桿向前推,主臂向左轉更大至90°;操縱桿向后拉,主臂向右轉更大至90°。
5、斗桿翻轉操縱桿:操縱桿向前推,斗桿向左翻轉更大至180°;操縱桿向后拉,斗桿向右翻轉更大至180°。
6、推土鏟操縱桿:操縱桿向前推,推土鏟下降與物料接觸;操縱桿向后拉,推土鏟抬升與物料分離。
7、破碎錘操縱桿:操縱桿向前推,破碎錘開始工作;操縱桿向后拉,破碎錘停止工作。
8、起動器遠控按鈕:該按鈕位于司機坐椅右前側,綠色為啟動,紅色為停止。
9、電鈴按鈕:位于司機坐椅左前側,顏色為紅色。
10、起動器啟動按鈕:該按鈕位于司機坐椅右側,綠色為啟動,紅色為停止。
11、急停按鈕在機器后部。
巷道修復機液壓系統由主油泵、單聯齒輪泵、液壓馬達、液壓油缸、回轉驅動、旋轉擺動油缸、主閥、濾油器、散熱器、油箱及各種附件組成。修復機由主泵、雙聯齒輪泵和主閥分別組成兩組共11種液壓回路,分別由主泵提供鏟斗油缸、主臂油缸、左行走馬達、右行走馬達、斗桿油缸、回轉驅動、旋轉擺動油缸、液壓錘(備用)壓力油,一聯齒輪泵提供上車回轉馬達及推土鏟油缸壓力油。
底盤總成主要由機架、左右履帶行走機構、電控箱支承架、操作系統支承架等部件組成。用螺栓將左右履帶行走機構與機架聯在一起,構成底盤系統,作為全車的基礎。將電控箱支承架、操作系統支承架聯在機架上,構成底盤總成。總成使整機的各大部件聯系在一起,并提供了各液壓操縱元件、電氣元件和駕駛室的安裝空間。履帶式行走裝置,能承受較大的機重,爬坡能力強,接地比壓小,行走平穩,能適應陡坡行駛和急轉彎。行走裝置有兩條履帶,分別由兩套驅動裝置單驅動,實現整機的前進、后退與轉彎,同時也可使整機作原地旋轉運動。
使用巷道修復機在井下巷道內臥底,落石,修復巷道,能大大降低職工勞動強度,節約大量人工。巷道修復機操作簡單,易學易會,操作方便舒適,標準配置的操作桿、操作平穩,靠背椅接近人體形狀,牢固耐用,可有效緩解駕駛員的操作疲勞。易于保養,油泵及控制閥防護罩可完全打開,便于檢查、保養。全液壓系統控制,動力單一,液壓系統,管路布置合理,安全穩定性好。
巷道修復機可一機多用,除完成裝載作業外,還可完成作業點短距離運輸、臥底、清幫等工作。與破碎錘靈活互換,可對巷道底板、側幫底部進行破碎、修護等,對大塊巖石、煤塊等進行破碎。液壓系統,采用負載敏感變量系統。本機結構緊湊,主要動作采用比例先導閥控制,操作輕松簡便,工作平穩無沖擊。