關鍵詞 |
銷售巷道修復機,巷道修復機聯系方式,西安巷道修復機,履帶式巷道修復機 |
面向地區 |
全國 |
煤礦用巷道修復機(簡稱巷修機)該機具有以下特點:
1、與傳統的人工清底相比,使用該機在大大節約人工成本的同時,提高了工作效率,改善了工作環境。
2、與傳統的柴油機動力小型挖掘機相比,由于采用電動液壓系統,因而具有噪聲低、無尾氣污染等特點,更適用于井下巷道修復。
3、整機結構緊湊、外形尺寸小,入井時工作裝置可回收到小尺寸,便于整體入井及升井。
4、整機結構緊湊、外形尺寸小,當回轉時尾部與兩幫不會碰撞,因此更加適用于井下狹小空間作業。
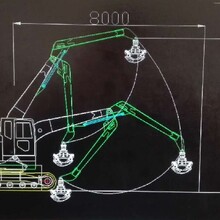
5、與同類型設備相比,工作裝置前端的鏟斗或破碎錘頭可以360°旋轉,更加方便巷道修復。
6、主要動作采用先導閥控制,操作輕松簡便,工作平穩無沖擊。巷道修復機參數
室內各操作手柄布置(手柄操作指示牌):現將各操作手柄及按鈕的功能及操作方向分別說明如下(方向基準為機器行走馬達位于后部,操作者面向機器前進方向):
1、左操縱桿:操縱桿向前推,斗桿油缸伸出,斗桿收回;操縱桿向后拉,斗桿油缸縮回,斗桿張開;操縱桿向左拉,右側油缸伸出,左側油缸收回,副臂在水平面向左擺動≥40°;操縱桿向右拉,左側油缸伸出,右側油缸收回,副臂在水平面向右擺動≥40°。
2、右操縱桿:操縱桿向前推,主臂油缸伸出,主臂升起;操縱桿向后拉,主臂油缸收回,主臂下降;操縱桿向左拉,鏟斗油缸伸出,鏟斗收回;操縱桿向右拉,鏟斗油缸收回,鏟斗伸出。
3、行走操縱桿:兩個操縱桿同時向前推時,機器向前行走;兩個操縱桿同時向后拉時,機器向后行走;僅推右邊操縱桿時,機器向左轉;僅推左邊操縱桿時,機器向右轉;在向后拉一個操縱桿的同時向前推另一個操縱桿,則機器原地旋轉。
4、主臂翻轉操縱桿:操縱桿向前推,主臂向左轉更大至90°;操縱桿向后拉,主臂向右轉更大至90°。
5、斗桿翻轉操縱桿:操縱桿向前推,斗桿向左翻轉更大至180°;操縱桿向后拉,斗桿向右翻轉更大至180°。
6、推土鏟操縱桿:操縱桿向前推,推土鏟下降與物料接觸;操縱桿向后拉,推土鏟抬升與物料分離。
7、破碎錘操縱桿:操縱桿向前推,破碎錘開始工作;操縱桿向后拉,破碎錘停止工作。
8、起動器遠控按鈕:該按鈕位于司機坐椅右前側,綠色為啟動,紅色為停止。
9、電鈴按鈕:位于司機坐椅左前側,顏色為紅色。
10、起動器啟動按鈕:該按鈕位于司機坐椅右側,綠色為啟動,紅色為停止。
11、急停按鈕在機器后部。
煤礦用巷道修復機是一種多功能巷道修護設備,主要用于煤巷、半煤巖巷、全巖巷,可以對巷道頂板、底板及側幫進行破碎、挖裝、鏟平等日常維護作業,也可對大塊的巖石、煤塊進行破碎,以便裝運。
煤礦用巷道修復機工作臂可以沿車身軸線旋轉±90°,可以滿足挖掘、側掏、翻轉、破巖、裝車、起吊等各項動作要求,實現挖掘毛水溝、臥底、破巖、清理浮煤、清理皮帶機底部、平整巷道及小型配件吊裝等多種功能。
使用條件
1) 巷道環境:-5℃~+40℃,大相對濕度≤90%,適宜溫度為 25℃;
2) 海拔高度≤1000m,海拔 1000m 以上高原環境需根據情況進行特殊設計;
3) 電壓極限偏差為±5%,交流頻率極限偏差為±1%;
4) 工作面積水高度低于履帶鏈軌節;
5) 工作時周圍空氣中的煤塵、甲烷爆炸性氣體不得超過《煤礦安全規程》所規定的安全含量;
6) 巷道坡度見技術參數規定;
7) 巖石的普氏硬度 f 小于等于 10,松散密度不大于 1.8t/m3。
一種多功能巷道修護設備,修復機配備電纜卷筒,可實現電纜自動卷放,整機配備甲烷斷電儀,可實現瓦斯濃度過高時自動斷電。修復機主要用于煤巷、半煤巖巷、全巖巷,可以對巷道底板及側幫進行破碎、挖裝、鏟平等日常維護作業,也可以對大塊的巖石、煤塊進行破碎,以便裝運。